Hauptinhalt
Topinformationen
EMAROs – Miniroboter für Forschung und Lehre

Mobile Miniroboter sind ideale Evaluationsplattformen für die Lehre und eine Vielzahl von Forschungsfragestellungen. In diesem Bereich positioniert sich unser Mini-Roboter EMAROs (Educational Modular Autonomous Robot Osnabrück) mit einer einzigartigen Kombination aus Modularität, Rechenleistung, Sensorik und Softwareunterstützung. EMAROs verfügt über zwei Kameras für Stereosicht, inertiale Messeinheit (IMU), Abstandssensoren und eine Vielzahl weiterer Sensoren und Kommunikationsschnittstellen.
Ein wichtiges Alleinstellungsmerkmal des Roboters ist seine modulare integrierte Rechnerhardware. Sie ermöglicht neben Robotik-Fragestellungen auch die Bearbeitung spannender Projekte im Bereich heterogener Hardwarearchitekturen und domänenspezifischer Beschleuniger. Trotz seiner geringen Größe mit einem Durchmesser von etwa 10 cm können verschiedenste Rechenknoten in EMAROs integriert werden. Die Möglichkeiten reichen von eingebetteten CPUs und Grafikprozessoren (GPUs) bis hin zu rekonfigurierbarer Hardware (FPGAs) und speziellen Beschleunigern für maschinelles Lernen. Als Programmierframework kommt das Robot Operating System (ROS 2) zum Einsatz. Dank umfangreicher Softwareunterstützung für EMAROs können sich die Studierenden auf die Entwicklung neuer Algorithmen sowie auf deren ressourceneffiziente Implementierung konzentrieren und die verschiedenen Computerplattformen vergleichen.
VERA – Virtuelle Umgebung für reale Roboter-Experimente
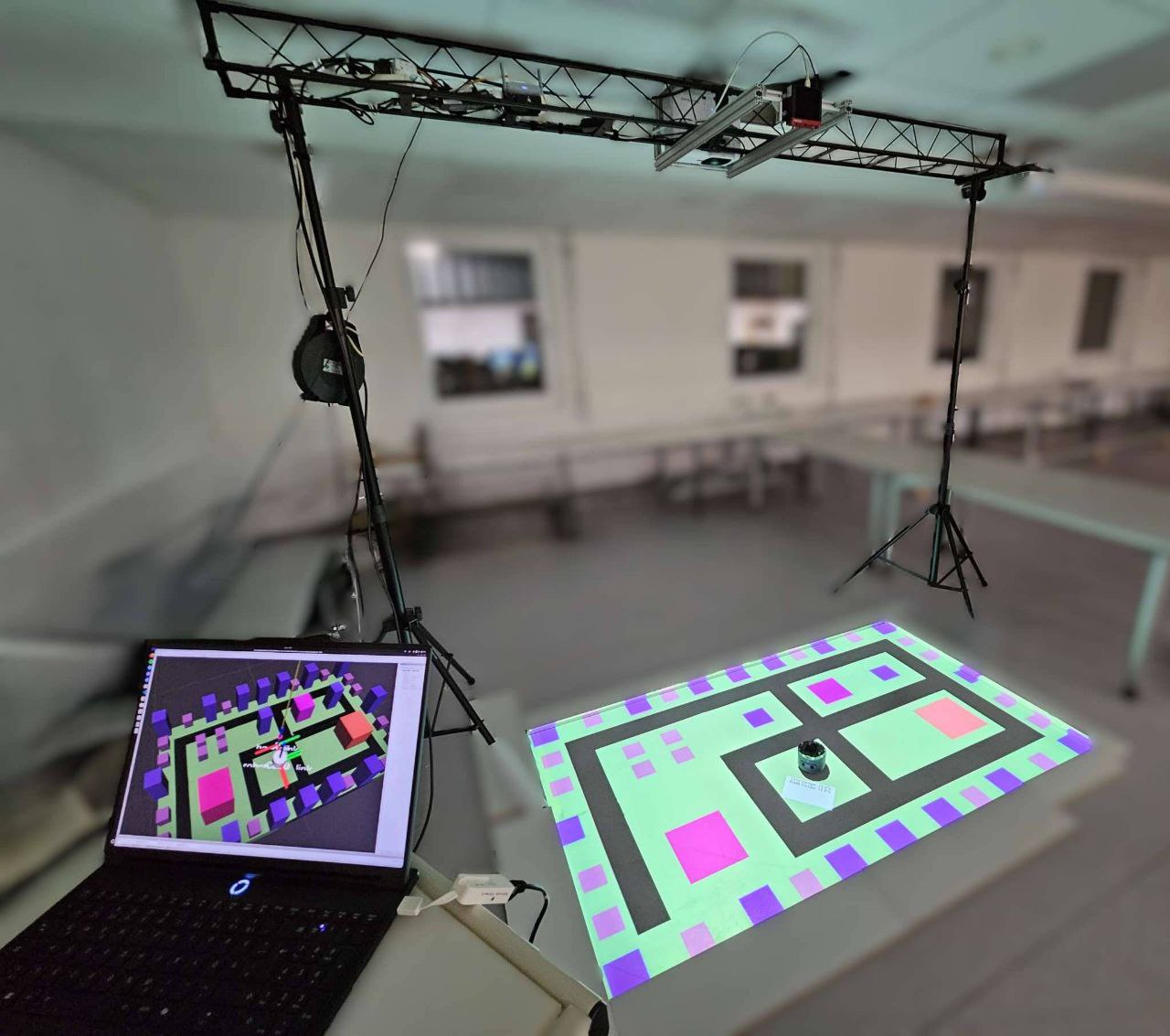
Als Evaluationsplattform für EMAROs und andere Miniroboter entwickeln wir VERA – das virtuelle Environment für mobile Roboteranwendungen. VERA ist ein modulares und skalierbares Framework, das Konzepte von digitalen Zwillingen, Augmented Reality und Vehicle-in-the-Loop-Tests integriert, um die Lücke zwischen Simulation und realen Tests zu schließen. VERA ermöglicht synchronisierte virtuelle und projizierte Umgebungen, so dass Roboter in beiden Umgebungsdarstellungen dynamisch interagieren können.
Die Systemarchitektur umfasst drei Schlüsselkomponenten: Das Virtual Environment Positioning System (VEPS) zur Echtzeit-Lokalisierung von Robotern, einen Umgebungsmanager zur dynamischen Objektbehandlung und Pfadverfolgung sowie eine Visualisierungskomponente zur Projektion der virtuellen Umgebung mit zusätzlichen AR-ähnlichen Funktionen in die reale Welt. Mit unserer Miniroboterplattform EMAROs können die Möglichkeiten von VERA eindrucksvoll demonstriert werden. Neue Algorithmen für Pfadverfolgung, Navigation und Objektmanipulation lassen sich mit dem realen Roboter in einer projizierten, virtuellen Welt testen.
VERA kann für neuartige Roboteranwendungen leicht angepasst und erweitert werden. Durch die Kombination und Synchronisation von simulierten und projizierten Umgebungen stellt VERA eine flexible Plattform für die Entwicklung und den Echtzeit-Testen von mobilen Roboteranwendungen dar.
